Home
Insects have been associated with mankind for many different reasons, beneficially and harmfully. They are advantageous a biological control agent, can beneficially provide us with a food source, pollinate our flowers and assist in the production of honey, wax and silk products (Gillott, 2005). Deleteriously though, insects can be identified as large pests, causing damage and death to manufactured good, humans and agricultural forests or products. 1% of insects in the world are responsible for these human interactions (Gillott, 2005), and most recently, the biology of their lifestyles has also assisted humans for the insight of mechanical robots. Their basic tripod gat walking mechanism has gone onto be another beneficial interaction with humans. Even though insects can cause a lot of money and death as pests, it if wasn’t for their presence, our world would be very different (Gillott, 2005).
Insects inhabit many different ways of locomotion. Depending on the species, insects can inhabit aerial locomotion such a flight and/or terrestrial locomotion. Flight is a very complicated and diverse way of movement, as well as the terrestrial insect-walking gait. The walking gait is also known as the ‘tripod gait’, seen in figure 1.
Insects inhabit many different ways of locomotion. Depending on the species, insects can inhabit aerial locomotion such a flight and/or terrestrial locomotion. Flight is a very complicated and diverse way of movement, as well as the terrestrial insect-walking gait. The walking gait is also known as the ‘tripod gait’, seen in figure 1.
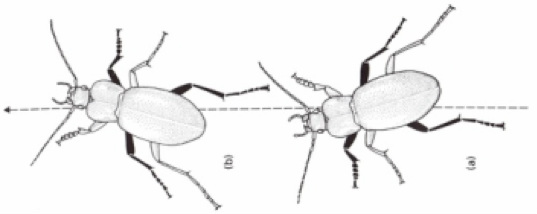
Figure 1: The Tripod Gait (adapted from Gullan et al., 2005)
Occurring within the subphylum hexapod, insects can be primarily identified due to their appendage count, six (Cruse et al., 2009). Their six-legged lifestyle enables them to undertake this ingenuous walking mechanism. Being such a stable and simple walking gait, many researchers have taken insight into this walking style as an appropriate model for robots. As well as insects, other hexapody species inhabit this tripod-walking gait.
By Bec Baxter
By Bec Baxter
