Tripod-walking Gait
Firstly, the sensory and physically anatomy of the legs (seen in figure 2), plays a large part in the gait. Cockroaches, having a distinctive tripod stance, underlie the primitive appendage structure for the tripod gait. The appendage has 4 segments, the coxa (the top segment), the femur, the tibia and the bottom segment, the tarsus. The entire appendage is externally covered in sensory hairs, that help detect the movement in the surrounding environment, and internally, the appendage comprises of muscle receptor and chordotontal organs (Chen et al. 2012). The chordotonal organs are not associated with external sensory structure but are found between the joints of the limbs as a cluster of sensilla that act as mechanoreceptors (Field et al., 1998). The muscle receptor organs respond to sensory stimuli through excitatory processes (Fedorova et al., 2008).
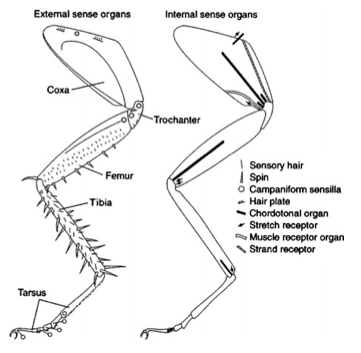
Figure 2: The physical anatomy and external and internal sense organs of the cockroaches' leg (adapted from Chen et al., 2012)
To demonstrate this walking gait, seen in figure 3, 6-legged insects have 3 legs on the ground at all times while the other 3 legs are lifted in a swinging motion. The swinging duration of the legs is dependent on the speed in which the insect is going (Cruse et al., 2009). The tripod gait positions the animal in a way where the front and hind leg on one side of the insect move/swing together and work in a synchronized motion with one middle leg on the other side. As well as insects having at least 3 legs on a substrate at all times, their level of stability is increased even more due the adhesive structures on the end of their appendages, allowing them walk on vertical or horizontal structures (Cruse et al., 2009).
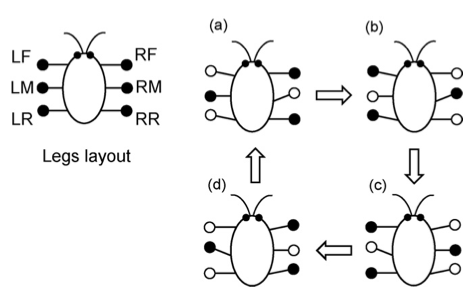
Figure 3: The walking pattern of the insect tripod gait (adapted from Iida et al., 2008)
As well as stability, the insect also inhabits control in their walking gait, which is generated by the Central Pattern Generator (CPG). The CPG is a series or neuronal circuits that are activated to produce rhythmic motor walking patterns. As well as walking, the CPG can also control other forms of locomotion such as fighting and swimming, and surviving mechanisms such as breathing (Marder et al., 2001). The Central pattern generator works specifically by applying input on timing and rhythmic information (Marder et al., 2001) without requiring sensory information (Chen et al., 2012). To control the locomotive system though, the CPG requires a series of central oscillations that are generated by the ganglion (Chen et al., 2012).
All insects demonstrate this walking mechanism some stage in their life. It is most strongly demonstrated though in the cockroaches (Cruse et al., 2009).
