Being adapted for Robots
Throughout the animal kingdom, different classes of animals have inhabited many diverse gait transitions. Humans walk with two legs, most mammals’ walk with four legs and insect have employed six-legged locomotion, the tripod gait (Chen et al., 2012). Humans have begun to take large insight though into the tripod gait as a very important way of leg movement. Compared to wheels or tracked movement, mechanical leg movement can be adapted to very diverse and various terrain types (Chen et al., 2012). As well as the adaptable tripod gait mechanism, the Central pattern generator, being the rhythmic generator, has also been proposed for the mechanical structure of robots.
Compared to four-legged locomotion, six-legged locomotion is relatively simple. Insects are the most exploited animal used for the robotic structure due to their very primitive neural system and stabilized locomotion type (Chen et al., 2012).
Compared to four-legged locomotion, six-legged locomotion is relatively simple. Insects are the most exploited animal used for the robotic structure due to their very primitive neural system and stabilized locomotion type (Chen et al., 2012).
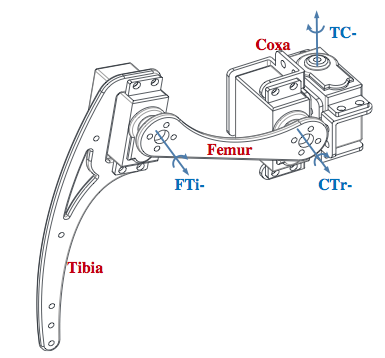
Figure 4: Robots legs based on the leg of an insect (adapted from Chen et al., 2012).
Robots’ have been based respectively on the locomotion of insects, as seen in figure 4. Mechanically, the tripod gait has been modeled through inverse kinematics to undergo the transfer phase (the swing of the 3 legs) and the support phase (the 3 legs based on the ground). If the gait were to change though, kinematics would have to be recalculated (Chen et al., 2012). To control each locomotive stride, the insects’ CPG method has been modified mechanically to simply control the gait transition. In an insect, the ganglia generate the control of the gait by a series of spontaneous oscillations, where as the robot has been planned to undergo neural oscillations which control the robots motor directly without the requirement of computer kinematics (Chen et al., 2012).
Robots influenced by the tripod gait walking structure have been proposed to have excellent mobility and stability. By undertaking the simple and unique characteristics of the six-legged insect, robots of this model can walk backwards, forwards and move in avoidance of substrates/barriers (Ming-dan et al., 2013). However, the robotic tripod gait may present some disadvantages.
